|
ROS Serial C client library
|
|
ROS Serial C client library
|
ROS Serial C nodehandle implementation. More...
#include "ros.h"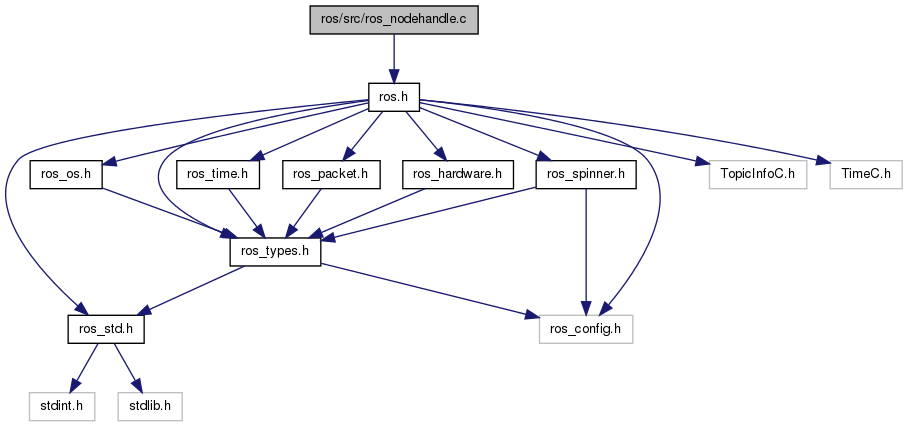
Enumerations | |
| enum | TOPIC_INFO { ID_PUBLISHER = 0, ID_SUBSCRIBER = 1, ID_SERVICE_SERVER = 2, ID_SERVICE_CLIENT = 4, ID_PARAMETER_REQUEST = 6, ID_LOG = 7, ID_TIME = 10, ID_PUBLISHER = 0, ID_SUBSCRIBER = 1, ID_SERVICE_SERVER = 2, ID_SERVICE_CLIENT = 4, ID_PARAMETER_REQUEST = 6, ID_LOG = 7, ID_TIME = 10 } |
Functions | |
| rosReturnCode_t | rosPublish (void *message) |
| Nodehandle publish implementation. | |
| rosReturnCode_t | rosPublishLoopback (void *message) |
| rosPublisher_t * | rosAdvertise (rosMessageHandle_t *messagehandle, char *topic, uint16_t buffer_size) |
| Nodehandle advertise implementation. | |
| rosSubscriber_t * | rosSubscribe (rosMessageHandle_t *messagehandle, char *topic, uint16_t buffer_size, void(*callback)(void *message)) |
| Nodehandle subscribe implementation. | |
| rosNodeHandle_t * | rosNodeHandle (char *device_id) |
| Get pointer to global nodehandle. | |
| void | rosSpinAll () |
Variables | |
| rosNodeHandle_t * | g_nodehandles [] |
| int | g_nodehandles_size |
ROS Serial C nodehandle implementation.
THE SOFTWARE IS PROVIDED "AS IS" AND THE AUTHOR DISCLAIMS ALL WARRANTIES
WITH REGARD TO THIS SOFTWARE INCLUDING ALL IMPLIED WARRANTIES OF
MERCHANTABILITY AND FITNESS. IN NO EVENT SHALL THE AUTHOR BE LIABLE FOR
ANY SPECIAL, DIRECT, INDIRECT, OR CONSEQUENTIAL DAMAGES OR ANY DAMAGES
WHATSOEVER RESULTING FROM LOSS OF USE, DATA OR PROFITS, WHETHER IN AN
ACTION OF CONTRACT, NEGLIGENCE OR OTHER TORTIOUS ACTION, ARISING OUT OF
OR IN CONNECTION WITH THE USE OR PERFORMANCE OF THIS SOFTWARE.
| rosNodeHandle_t* rosNodeHandle | ( | char * | device_id | ) |
Get pointer to global nodehandle.
 1.7.6.1
1.7.6.1 
