|
ROS Serial C client library
|
|
ROS Serial C client library
|
ROS Serial C type definitions. More...
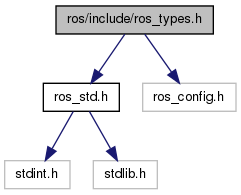
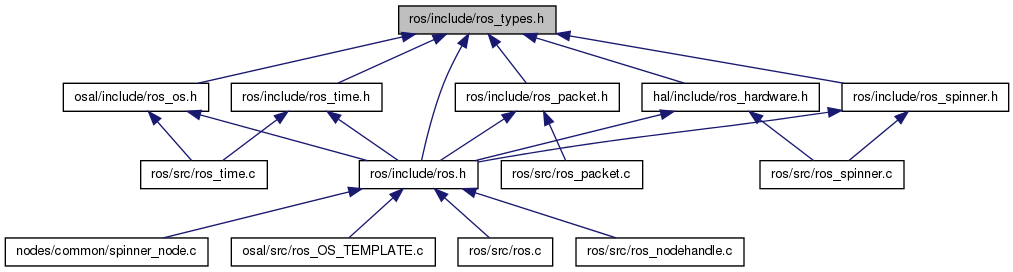
Go to the source code of this file.
Data Structures | |
| struct | rosFifoBuffer |
| Structure to hold fifo buffer. More... | |
| struct | rosPacket |
| Structure to hold serialized messages. More... | |
| struct | rosTime |
| Structure to hold time information. More... | |
| struct | rosRate |
| Structure to hold time rate information. More... | |
| struct | rosPublisher |
| Structure to hold information about publisher and its messagehandle. More... | |
| struct | rosSubscriber |
| Structure to hold information about subscriber and its messagehandle. More... | |
| struct | rosInterface |
| Structure to hold information about nodehandles interface. More... | |
| struct | rosNodeHandle |
| Structure to hold information about a nodehandle. More... | |
| struct | rosMessageHandle |
| Structure to hold information about message de-/serialization. More... | |
| struct | osROSNode |
| Structure to hold information for starting a ROS Node in OS way. More... | |
Typedefs | |
| typedef struct rosMessageHandle | rosMessageHandle_t |
| Structure to hold information about message de-/serialization. | |
| typedef enum rosReturnCode | rosReturnCode_t |
| Enumerator defining ROS return codes. | |
| typedef struct rosFifoBuffer | rosFifoBuffer_t |
| Structure to hold fifo buffer. | |
| typedef struct rosPacket | rosPacket_t |
| Structure to hold serialized messages. | |
| typedef struct rosTime | rosTime_t |
| Structure to hold time information. | |
| typedef struct rosRate | rosRate_t |
| Structure to hold time rate information. | |
| typedef struct rosPublisher | rosPublisher_t |
| Structure to hold information about publisher and its messagehandle. | |
| typedef struct rosSubscriber | rosSubscriber_t |
| Structure to hold information about subscriber and its messagehandle. | |
| typedef enum INTERFACE_TYPE | rosInterfaceType_t |
| Enumerator defining interface types. | |
| typedef struct rosInterface | rosInterface_t |
| Structure to hold information about nodehandles interface. | |
| typedef struct rosNodeHandle | rosNodeHandle_t |
| Structure to hold information about a nodehandle. | |
| typedef struct osROSNode | osROSNode_t |
| Structure to hold information for starting a ROS Node in OS way. | |
Enumerations | |
| enum | rosReturnCode { ROS_NOT_OK = 0, ROS_OK, ROS_SUCCESS, ROS_FAIL, ROS_INIT_NOT_CALLED, ROS_NODEHANDLE_NOT_CONFIGURED, ROS_CONFIGURING, ROS_OUT_OF_MEMORY, ROS_FIFO_BUFFER_EMPTY, ROS_FIFO_BUFFER_OVERFLOW } |
| Enumerator defining ROS return codes. More... | |
| enum | INTERFACE_TYPE { SLAVE, MASTER, BRIDGE, LOOPBACK } |
| Enumerator defining interface types. | |
ROS Serial C type definitions.
THE SOFTWARE IS PROVIDED "AS IS" AND THE AUTHOR DISCLAIMS ALL WARRANTIES
WITH REGARD TO THIS SOFTWARE INCLUDING ALL IMPLIED WARRANTIES OF
MERCHANTABILITY AND FITNESS. IN NO EVENT SHALL THE AUTHOR BE LIABLE FOR
ANY SPECIAL, DIRECT, INDIRECT, OR CONSEQUENTIAL DAMAGES OR ANY DAMAGES
WHATSOEVER RESULTING FROM LOSS OF USE, DATA OR PROFITS, WHETHER IN AN
ACTION OF CONTRACT, NEGLIGENCE OR OTHER TORTIOUS ACTION, ARISING OUT OF
OR IN CONNECTION WITH THE USE OR PERFORMANCE OF THIS SOFTWARE.
| typedef struct osROSNode osROSNode_t |
Structure to hold information for starting a ROS Node in OS way.
Used to start ROS Nodes in a nice automated way. ;-)
| enum rosReturnCode |
Enumerator defining ROS return codes.
 1.7.6.1
1.7.6.1 
