|
ROS Serial C client library
|
|
ROS Serial C client library
|
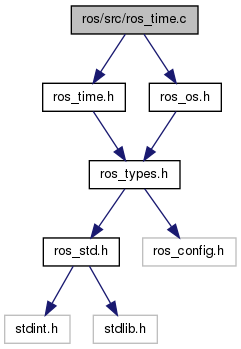
ROS Serial C time implementation. More...
Functions | |
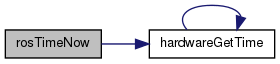
| rosTime_t | rosTimeNow () |
| Get current time. | |
| void | rosTimeSetNow (rosTime_t *new_now) |
| Set current time. | |
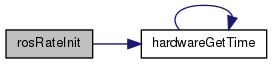
| void | rosRateInit (rosRate_t *rate, uint32_t frequency) |
| Initialize rate. | |
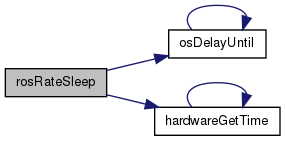
| void | rosRateSleep (rosRate_t *rate) |
| Sleep given rate. | |
Variables | |
| uint32_t | g_sync_request_time = 0 |
| uint32_t | g_sec_offset = 0 |
| uint32_t | g_nsec_offset = 0 |
| uint32_t | g_last_sync_time = 0 |
| uint32_t | g_last_sync_receive_time = 0 |
| uint32_t | g_last_msg_timeout_time = 0 |
ROS Serial C time implementation.
THE SOFTWARE IS PROVIDED "AS IS" AND THE AUTHOR DISCLAIMS ALL WARRANTIES
WITH REGARD TO THIS SOFTWARE INCLUDING ALL IMPLIED WARRANTIES OF
MERCHANTABILITY AND FITNESS. IN NO EVENT SHALL THE AUTHOR BE LIABLE FOR
ANY SPECIAL, DIRECT, INDIRECT, OR CONSEQUENTIAL DAMAGES OR ANY DAMAGES
WHATSOEVER RESULTING FROM LOSS OF USE, DATA OR PROFITS, WHETHER IN AN
ACTION OF CONTRACT, NEGLIGENCE OR OTHER TORTIOUS ACTION, ARISING OUT OF
OR IN CONNECTION WITH THE USE OR PERFORMANCE OF THIS SOFTWARE.
| void rosRateInit | ( | rosRate_t * | rate, |
| uint32_t | frequency | ||
| ) |
Initialize rate.
| start_time | Initial start time |
| frequency | Frequency to achieve |
| void rosRateSleep | ( | rosRate_t * | rate | ) |
Sleep given rate.
| rate | Pointer to rosRate_t struct |
| rosTime_t rosTimeNow | ( | ) |
Get current time.
| void rosTimeSetNow | ( | rosTime_t * | new_now | ) |
Set current time.
| pointer | to a rosTime structure |
 1.7.6.1
1.7.6.1 
